相信大家在进行C/C++开发时,经常会遇到项目管理的问题。如果你只有一个源文件,那么这将不是什么难事,一条gcc/g++指令,配合上合适的参数,就能够做得很好。但是对于像这样庞大的工程: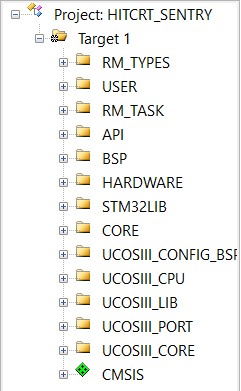
每个源文件需要一行编译命令,之后还需要链接,才能编译成二进制可执行文件与库,想着想着,我人都傻了Σ(っ °Д °;)っ
幸好有的IDE已经很智能地帮我们做了这一点,我们只需要用图形界面配置好工程中文件的组织形式,引用路径,库的位置,就能够一键编译了。(比如交叉编译IDE 我们熟知的Keil)
但是IDE灵活性不足,并且有平台的局限性,不能做到轻量化,在使用VSCode这种不带编译器的编辑器的时候,想要更多地自己配置编译方式,就需要用到我们今天的主角Makefile与CMake了!
Makefile
为了能够自动化地配置工程,完成编译,人们发明了Makefile这样的文件。在含有Makefile文件的目录下执行make命令就可以执行编译动作。使用设定好的编译器,系统会读取Makefile文件的内容进行编译。
Makefile按照目标:依赖的结构组织工程,后面紧接着由依赖变化到目标的gcc(g++)命令。使用自动化变量加上自动寻找依赖的机制,Makefile的确使得编译更加方便,但是要写好Makefile,还是离不开gcc(g++)繁琐的语法,同时还要满足Makefile的语法格式。人们又发明了自动生成Makefile文件的工具CMake。
##
Makefile的语法
CMake
想要使用Makefile,一般的Linux系统都会自带Makefile工具。但是CMake需要自行安装。CMake的设计初衷就是使用简单易懂的CMake语法生成晦涩难懂的Makefile语法,使得配置编译设置就像在IDE使用图形化配置一样方便(事实上确实有图形化的CMake——CMake GUI)。
在工程目录创建一个CMakeLists.txt文件,并且创建子目录build,用于放置编译生成的中间文件,进入build,执行cmake ..(注意这个..,表示上一级目录),就会生成我们想要的Makefile文件了,相信这个步骤使用源码安装Linux软件的同学都不陌生。
CMake语句:
project(main)
cmake_minimum_required(VERSION 2.8)新建一个CMake项目main,确定cmake需要的最低版本为2.8
set(CMAKE_BUILD_TYPE “Release”)
set(CMAKE_CXX_FLAGS “-O3”)
set(CMAKE_CXX_FLAGS “-std=c++11”)
确定编译发布版,优化-o3,C++标准为c++11,set就是进行变量的赋值
set(EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
set(LIBRARY_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/lib)
确定输出可执行文件、库文件的位置
find_package(OpenCV REQUIRED)
找到系统已经安装的库文件的路径,将其赋值给对应变量。一些比较大的库自己能够告知CMake自己的位置,但是有时就需要我们把FindXXlib.cmake文件告诉CMake(一般库中会提供的):
list(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake)
确定cmake文件的位置
include_directories(${OpenCV_INCLUDE_DIRS})
添加头文件目录,相当于gcc(g++)命令中的-I
add_subdirectory(./src)
添加一个子目录,需要保证子目录中有CMakeLists.txt文件,然后就会执行子目录中的CMake文件,用于多个目录的工程。一般在子目录中将源文件编译为库文件,再在根目录的CMake中链接这个库。
add_library(HELLO hello.cpp)
add_executable(main main.cpp)
生成一个库、可执行文件,使用源文件(可以是多个),进行编译、链接,生成一个二进制文件,相当于gcc(g++)中的 -o
target_link_libraries(common ${OpenCV_LIBS})
给可执行文件链接一个库,这个库可以是绝对路径,也可以是已经放在环境变量中的变量。
总而言之这就是CMake的基本原理,确实是大大方便了工程项目配置,已经逐渐成为了主流。
附上在学习高翔老师《视觉SLAM14讲》时使用的CMake文件,留做参考。
./中的CMakeLists.txt
project(main)
cmake_minimum_required(VERSION 2.8)
set(CMAKE_BUILD_TYPE "Release")
#set(CMAKE_BUILD_TYPE "Debug")
set(CMAKE_CXX_FLAGS "-O3")
set(CMAKE_CXX_FLAGS "-std=c++11")
set(EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin)
set(CMAKE_CXX_FLAGS "-std=c++11 -O2 ${SSE_FLAGS} -g -march=native")
set(G2O_LIBS g2o_core g2o_stuff g2o_types_sba g2o_types_slam3d
g2o_solver_csparse g2o_csparse_extension cholmod g2o_solver_cholmod cxsparse)
list(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake)
find_package(Sophus REQUIRED)
find_package(OpenCV REQUIRED)
find_package(Pangolin REQUIRED)
find_package(Ceres REQUIRED)
Find_Package(CSparse REQUIRED)
find_package(G2O REQUIRED)
include_directories(${G2O_INCLUDE_DIRS})
include_directories( ${CSPARSE_INCLUDE_DIR} )
include_directories(${OpenCV_INCLUDE_DIRS})
include_directories(${Sophus_INCLUDE_DIRS})
include_directories(${CERES_INCLUDE_DIRS})
include_directories(/usr/include/eigen3)
include_directories(./src)
include_directories(./include)
add_subdirectory(./src)
add_executable(main main.cpp)
target_link_libraries(main HELLO)
target_link_libraries(main common)
target_link_libraries(main ${Pangolin_LIBRARIES})
target_link_libraries(main ${OpenCV_LIBS})
target_link_libraries(main ${CERES_LIBRARIES})
target_link_libraries(main ${G2O_LIBS})./src中的CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
set(CMAKE_BUILD_TYPE "Release")
# set(CMAKE_CXX_FLAGS "-O3")
set(LIBRARY_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/lib)
set(G2O_LIBS g2o_core g2o_stuff g2o_types_sba g2o_types_slam3d
g2o_solver_csparse g2o_csparse_extension cholmod g2o_solver_cholmod cxsparse)
list(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake)
find_package(Sophus REQUIRED)
find_package(OpenCV REQUIRED)
find_package(Pangolin REQUIRED)
find_package(Ceres REQUIRED)
find_package(G2O REQUIRED)
include_directories(${G2O_INCLUDE_DIRS})
include_directories(${OpenCV_INCLUDE_DIRS})
include_directories(${Sophus_INCLUDE_DIRS})
include_directories(${CERES_INCLUDE_DIRS})
include_directories(/usr/include/eigen3)
include_directories(../include)
add_library(HELLO hello.cpp)
add_library(common common.cpp)
target_link_libraries(common ${Pangolin_LIBRARIES})
target_link_libraries(common ${OpenCV_LIBS})
target_link_libraries(common ${CERES_LIBRARIES})
target_link_libraries(common ${G2O_LIBS})