万众期待的P2来啦,这次为大家更新电流环与无感部分
正好和要申的一个专利相关,就白嫖了一点过来
自己白嫖自己应该不算什么侵权吧/笑哭
电流环控制——复矢量解耦
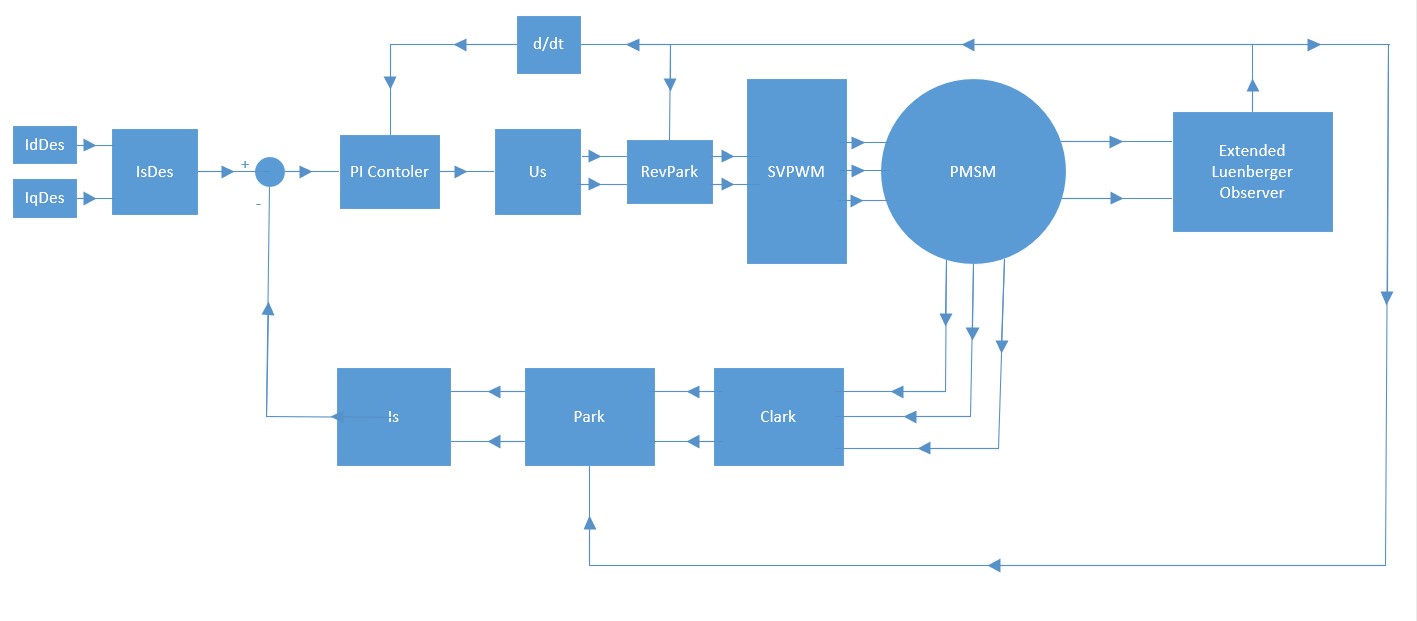
首先,电流采样得到电机三相线上的交变电流,依次经过Clark变换、Park’变换,得到相对转子静止的旋转坐标系下电流,即Iq(q轴电流)与Id(d轴电流),通过复矢量解耦与PI控制器的方法计算出当前应加载在q、d轴上的电压Uq与Ud,进一步,再使用反Park变换计算出静止坐标系下交变电压Uα、Uβ,即可通过SVPWM调制得到三相方波占空比,控制永磁同步电机的电流,进而控制电机力矩。
复矢量控制器的构造方法如下: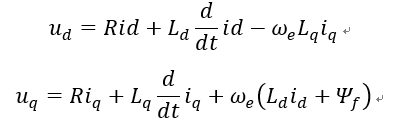
对于隐极电机,有Ld=Lq=L
可以看到q、d轴电压方程之间互相包含对方的电流,明显是一个耦合的系统。传统控制方法通过前馈的方法进行解耦,即在最终输入电机系统之前在输出电压值上补偿数学模型中 这一项,系统就可以得到解耦。然而,前馈解耦的方法过渡依赖于电机参数,即我们必须得到准确的Ld、Lq以及
这一项,系统就可以得到解耦。然而,前馈解耦的方法过渡依赖于电机参数,即我们必须得到准确的Ld、Lq以及 才能够较好地消除耦合影响。由此导致采用前馈解耦控制方法的电机存在电流波动,相应慢的缺陷。
才能够较好地消除耦合影响。由此导致采用前馈解耦控制方法的电机存在电流波动,相应慢的缺陷。
本专利采用一种新型的复矢量解耦的方法进行电流环控制:
首先构造控制量,构造电流复矢量i_S,其实部由id构成,虚部由iq构成,则有: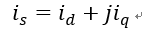
同理,我们可以构造电压复矢量U_S,其实部u_d由构成,虚部由u_q构成,则有: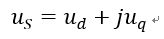
将上述方程与电机数学模型联立,可得到由电流、电压复矢量构成的新的电压方程如下:
由此可见,我们已经将两个互相耦合的系统变为一个整体,此时我们只需输出电压Us,即可控制电流is,在控制is的同时,id与iq也就得到了控制。
采取PI控制器控制:
其中PI参数可选取 控制系统带宽,有alpha越大,带宽越大,电流响应速度越快。但alpha不可无限制地增加,应考虑控制器输出电压的范围合理设计alpha的值。
控制系统带宽,有alpha越大,带宽越大,电流响应速度越快。但alpha不可无限制地增加,应考虑控制器输出电压的范围合理设计alpha的值。
最后在最终输出的uq部分可以前馈补偿上 ,使模型更加拟合真实模型。
,使模型更加拟合真实模型。
角度观测——扩张+龙伯格(Extended Luenberger Observer)
电流环控制器设计完成后,我们考虑无传感器设计方案。传统无传感器算法通常采用六步换向法,即通过检测三相线上的反电动势来估计转子位置,通过控制逆变器的六种状态来实现电机的无传感器运行。但这种方法无法精确控制电流,且最终电流波形为方波而非正弦波,就可能导致电机运行不平稳,调速不灵活等问题。本专利采取无传感器FOC控制算法,可以精确控制电流,实现电机平稳运行。使用龙伯格观测器观测电机的位置与速度,为FOC算法提供位置参考。
无传感器算法运行原理如下:
启动前首先通过控制恒定的A相电流,电流产生的磁场使得电机转子转动到固定的启动位置,随后开启开环启动流程。
开环启动时通过控制电流矢量的转动带动转子进行旋转,其中电流矢量旋转的速度与我们想要控制电机的速度相同
当电机达到一定速度时,停止增大电流适量转速,此时电机会保持恒定的转速,此时产生的转矩与阻力相等,电流矢量一部分是q轴电流,一部分是d轴电流。适当降低电流大小使得转子角度更接近设定的电流矢量的角度。
最后开启观测器,待观测器收敛,FOC算法使用观测到的角度,再由速度开环切换到速度闭环即可完成一次无传感器启动。
龙伯格观测器算法原理:
首先建立静止坐标系下电机模型:
其中: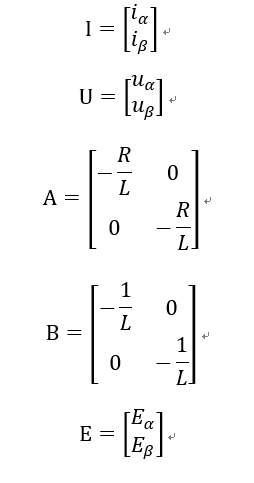
把扰动E当作一个状态变量,则得到状态向量为: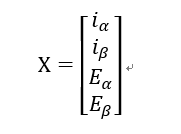
扩张后的状态方程为: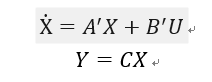
其中: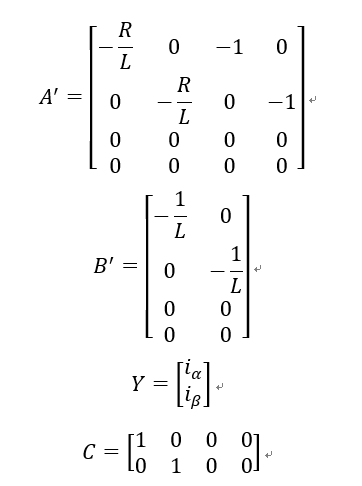
此处假设了 的倒数均为0,即变化率为零。
的倒数均为0,即变化率为零。
构建龙伯格观测器: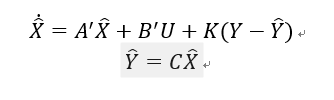
其中K为观测器增益,是一个四行一列的矩阵,且应该有 的形式。
的形式。
在满足能观性的前提下,通过调节K的值,可以设定观测器的带宽。
最终即可得到的观测值。
根据电机数学模型,有: ,可由反三角函数计算出电角度的值:
,可由反三角函数计算出电角度的值: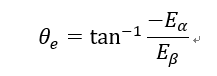
微分可计算出电角速度:
观测器模型的改进:
此前我们假设了变化率为零,但由上式我们得知,存在明显的微积分关系,可进一步改进观测器模型为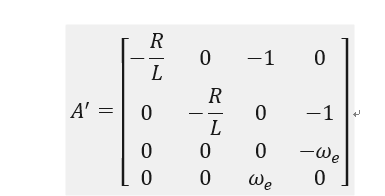
可以进一步提升观测器跟随效果。
框图
具体的系统框图如下: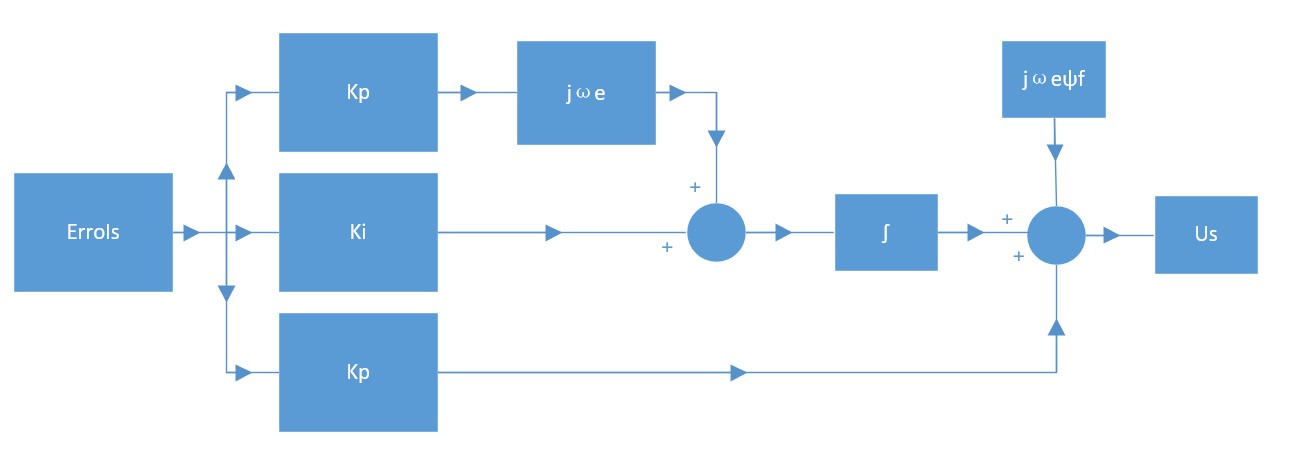
下期应该会出SVPWM和逆变器部分!
计网也在好好看啦(才怪)